現在の中身:0点
・ハンド交換時コネクタの着脱の為作業員が必要。 ・ハンドを回転させるためカールコードを使用していたが、断線が起きる。
・ハンド交換時コネクタ着脱が不要になり省力化された。 ・ケーブルの伸縮部分が無くなり、カールコードが不要、断線も無くなった。
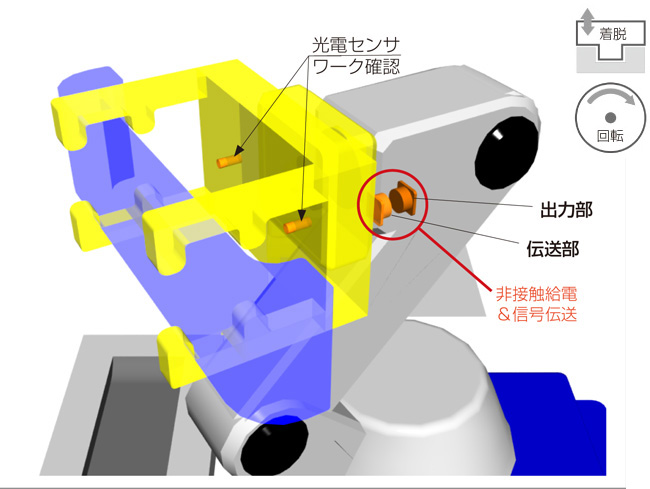
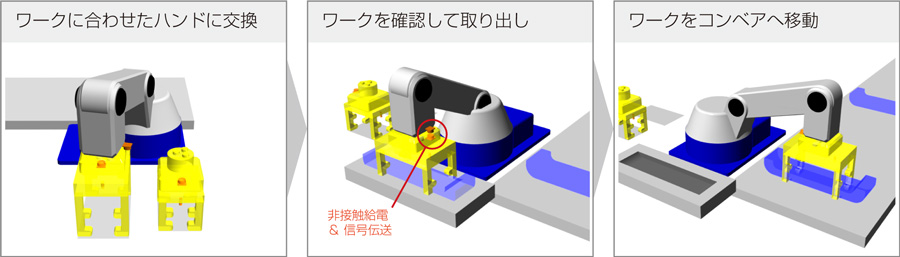
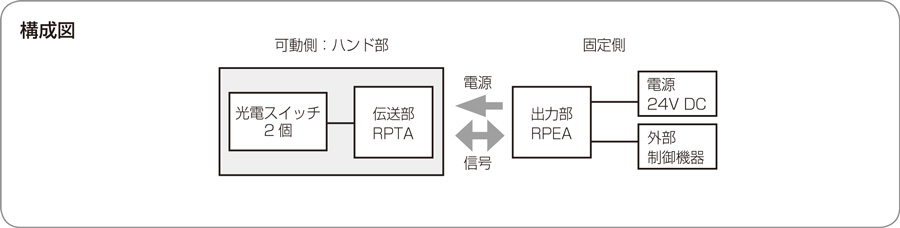
金型からワークを取り出すロボットハンドでワークの有無を確認する。 ハンド部分はワーク取り出し時に回転し、ワークに合わせて付け替える。 リモートシステムは、光電センサへの給電とその検出信号伝送を行う。
PDFのダウンロードはこちらから